AI Model-Free Control
Introduction
Use of Model-Free Control
Model-free control can solve problems where
-
MDP model is unknown, but experience can be sampled
-
MDP model is known, but is too big to use, except by samples
On/Off-Policy Learning
-
On-policy Learning
-
learn on the job
-
learn about policy $\pi$ from experience sampled from $\pi$
-
-
Off-policy learning
-
look over someone’s shoulder
-
learn about policy $\pi$ from experience sampled from $\mu$
-
On-Policy Monte-Carlo Control
$\epsilon$-Greedy Exploration
-
Simplest idea for ensuring continual exploration
-
All m actions are tried with non-zero probability
-
With probability $1-\epsilon$ choose the greedy action
-
With probability $\epsilon$ choose an action at random
$\epsilon$-Greedy Policy Improvement
GLIE
GLIE Monte-Carlo Control
-
Sample kth episode using $\pi$
-
For each state $S_t$ and action $A_t$ in the episode
- Improve policy based on new action-value function $$ \epsilon = \frac{1}{k}
\pi = $\epsilon$-greedy(Q) $$
On-Policy Temporal-Difference Learning
Sarsa Algorithm for On-policy Control
Convergence of Sarsa
Forward View Sarsa($\lambda$)
Backward View Sarsa($\lambda$)
-
Like TD($\lambda$), we use eligibility traces in an online algorithm
-
Unlike TD($\lambda$), Sarsa($\lambda$) has one eligibility trace for each state-action pair
-
Q(s,a) is updated for every state a and action a, in proportion to TD-error and the eligibility trace
Off-Policy Learning
-
Evalute target policy \pi(s,a) to compute $v_\pi(s)$ or $q_\pi(s,a)$ while following behavior policy $\mu(a s)$
Why Important?
-
Learn from observing humans or other agents
-
Re-use experience generated from old policies
-
Learn about optimal policy while following exploratory policy
-
Learn about multiple policies while following one policy
Importance Sampling
Importance Sampling for Off-policy Monte-Carlo
-
Use returns generated from $\mu$ to evaluate $\pi$
-
Weight return $G_t$ according to similarity between policies
-
Update value towards corrected return
-
Cannot use if
- $\mu$ is zero when $\pi$ is non-zero
-
Importance sampling can dramatically increase variance
Importance Sampling for Off-Policy TD
-
Use TD targets generated from $\mu$ to evaluate $\pi$
-
Much lower variance than Monte-Carlo importance sampling
-
Policies only need to be similar over a single step
Q-Learning
-
We now consider off-policy learning of action values Q(s,a)
-
No importance sampling is required
-
Next action is chosen using behavior policy
Off-policy Control with Q-Learning
-
Allow both behavior and target policies to improve
-
Target policy $\pi$ is greedy w.r.t. Q(s,a)
-
Behavior policy $\mu$ is $\epsilon$-greedy w.r.t. Q(s,a)
Q-Learning Control Algorithm
Q-Learning Algorithm for Off-policy Control
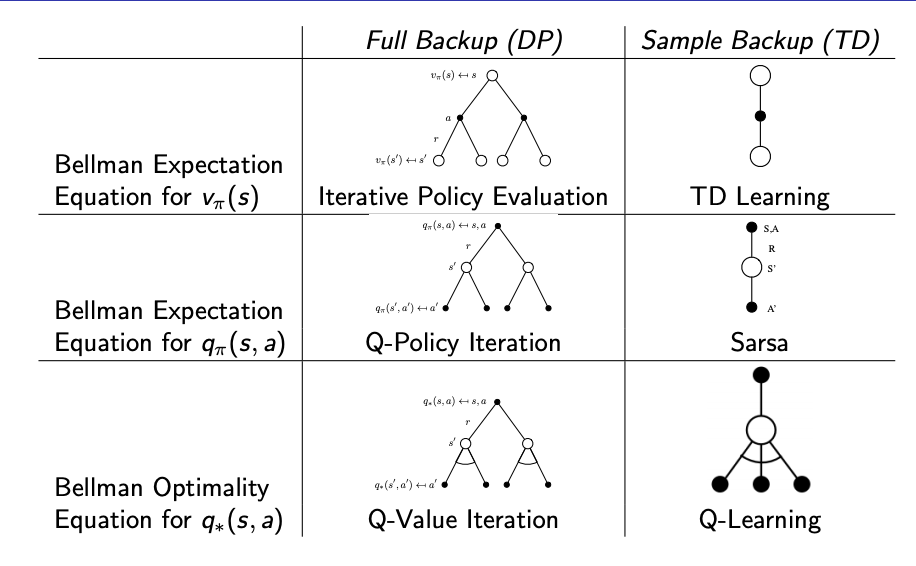
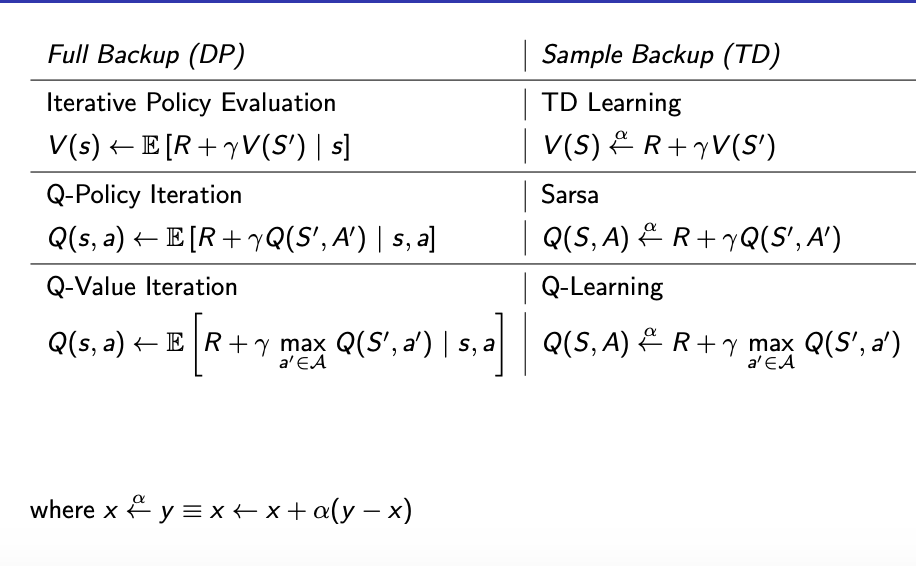
Summary
Relationship between DP & TD